■转向器的性能转向器[1]广泛用于自动控制场合。转向器的输出扭矩,转速,指令更新频率等标准化了转向器的工作性能。
在全国大学生智能汽车竞赛中,方向盘控制用于大多数汽车模型作品的方向控制。对于在轨道上行驶的汽车模型的速度,当合理设置控制参数时,最大速度取决于转向器的响应速度。
通常,转向器的操作取决于转向器的唯一脉冲指令高级时间宽度[2],与脉冲指令的频率无关。因此,控制转向器的脉冲波形和控制电动机的操作的PWM波形的功能不同。
转向器内部有一个驱动电路板,以确保输出角度和脉冲指令的宽度之间成比例关系。转向器的输出角速度取决于各种因素,例如转向器的内部机械结构,电动机的性能以及工作电压。
▲转向器指令和转向器轴的位置由于转向器的速度与指令无关,因此,转向器实质上不是线性模型[3]。当转向器以较大角度旋转时,其动态非线性更加明显。
01转向器的转速和工作电压转向器的转速越快,在智能汽车竞赛中汽车模型的控制性能就越好。我刚刚测试了角度编码器ST-3806-15-RS [4],它的每周角分辨率为15bit。
该角度编码器用于控制两轴机械臂。现在,它可以用于测试转向器的角度和角速度。
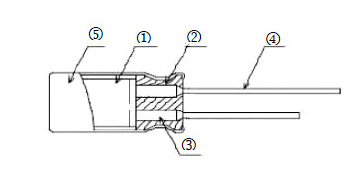
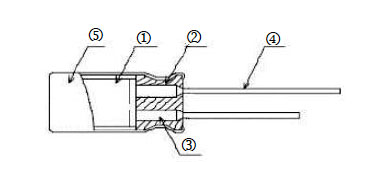
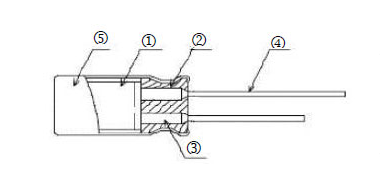
依次分析转向器的工作电压和执行速度之间的关系。 1.测量方法选择S-D5转向器,并使用橡胶套将转向器输出轴和角度编码器连接在一起。
使用机械平台将其同轴固定。使用角度编码器ST-3806-15-RS [4]测试电路模块读取角度传感器的值并控制多级旋转。
▲使用角度传感器测量转向器的转速。给定方向盘的脉冲命令,它从1000us变为2000us。
转向器顺时针旋转90°。在此过程中,收集角度的速率为3ms,并读取200个。
获得的角度曲线如下:取角度的上升线性部分(最小距离和最高5%的空白),并进行线性拟合。然后计算拟合直线与最小和最大角度之间的交点时间。
使用该交点之间的时间差作为伺服的执行时间。执行时间的倒数可以反映转向器的输出角速度。
▲测量旋转角曲线的相应执行时间2.测量数据接下来,使用数控直流电源将操舵装置的工作电压从4.0V调节到6V,分为20个工作电压点。在每个工作电压点,测量转向器的旋转曲线,并使用上述方法获得转向器的旋转时间。
▲随着工作电压的增加,转向器的旋转角度曲线发生变化。下图显示了转向器旋转时间和工作电压测量的数据曲线。
工作电压越高,伺服的执行时间越短。 ▲工作电压与旋转时间的关系取上述时间的倒数(1000 / time(ms)),就可以得到以下方向盘相对转速与工作电压的关系。
通常可以看出,转向器的执行速度与工作电压成正比。 ▲工作电压与转向器转速之间的关系02分析结论可以从先前的分析中看出:为了提高转向器的执行速度,可以尽可能多地提高转向器的工作电压尽可能在转向器的允许工作电压范围内;为了避免高工作电压对转向器内部电路的过电压的影响,有必要限制并稳定转向器的工作电源。
在操舵装置的工作过程中,如果操舵装置经常转动,则需要考虑操舵装置的散热。 ▲转向器命令在1000us和2000u之间变化。
-
 铝固体电解电容器(AREP系列)
铝固体电解电容器(AREP系列)
-
 铝固体电解电容器(AREC系列)
铝固体电解电容器(AREC系列)
-
 铝固体电解电容器(AR5K系列)
铝固体电解电容器(AR5K系列)
-
 铝固体电解电容器(AV5K系列)
铝固体电解电容器(AV5K系列)
-
 铝固体电解电容器(AR5P系列)
铝固体电解电容器(AR5P系列)
-
铝固体电解电容器 - AVEA 系列
-
AC-DC转换 二次侧PSR加速器
-
 大型HC系列
大型HC系列
-
电压转换 / 电位转换器 (ULS)
-
车用快速/超快速二极管
-
快速/超快速二极管
-
 高压电阻器(HVR..A系列)
高压电阻器(HVR..A系列)
-
温度传感器与开关
-
 长寿命高压HF系列
长寿命高压HF系列
-
温度开关
-
 光颉viking高精度电阻器(MFD系列)
光颉viking高精度电阻器(MFD系列)
-
 光颉viking四端高精度电流检测合金电阻器(4T系列)
光颉viking四端高精度电流检测合金电阻器(4T系列)
-
电压转换器逻辑IC
-
 宽温度范围CU系列
宽温度范围CU系列
-
 宽温度范围HE系列
宽温度范围HE系列
-
 反向大功率电流取样电阻
反向大功率电流取样电阻
公司: 深圳市捷比信实业有限公司
电话: 0755-29796190
邮箱: momo@jepsun.com
产品经理: 聂经理
QQ: 2215069954
地址: 深圳市宝安区翻身路富源大厦1栋7楼

更多资讯
获取最新公司新闻和行业资料。
- 电容与温度之间的关系 电容与温度之间的关系通常,在使用电容器时,只考虑电容器的容量和耐受电压,而不考虑温度对电容器的影响。事实上,电容器的许多参数都与温度密切相关。因此,在使用电容器时,应注意温度对电容器的影响,尤其是在设...
- 电感和电容之间的关系是什么? 电感和电容之间的关系是什么?电感和电容是电路中常见的两种无源元件,它们之间有着密切的关系。首先,电感器和电容器都可以储存能量。电感器储存磁场能量,而电容器储存电场能量。当电感和电容的值满足一定条件时,...
- 二极管的反向恢复时间和反向恢复电流 这是二极管的重要指示。所谓的快恢复二极管和慢恢复二极管就是基于这个标准。当二极管从正偏转换到反偏时,一个大的反向恢复电流将从阴极流向阳极,反向电流将首先上升到峰值,然后下降到零。...
- 变压器线圈电阻(变压器线圈电阻与电压之间的关系) 变压器线圈电阻(变压器线圈电阻与电压之间的关系)变压器线圈是否有电阻不会。如果有电阻和电流流过,肯定会产生热量。而“理想”是指没有能量损失,即变压器的输入功率等于输出功率,没有热量引起的能量损失,因此...
- 二极管的正向电阻和反向电阻有什么关系 二极管是一种常见的电子元件,具有两个特性:正向电阻和反向电阻。正向电阻是指二极管正向工作时的电阻值,而反向电阻是指反向工作时二极管的电阻值。二极管的正向电阻和反向电阻之间存在一定的关系。 ...
- AVEA系列铝固体电解电容器:面向未来电子系统的可靠之选 AVEA系列铝固体电解电容器技术亮点AVEA系列是新一代铝固体电解电容器的代表产品,融合了先进的材料科学与精密制造工艺,旨在满足现代电子设备对高效率、高稳定性和高可靠性的多重需求。该系列特别适用于需要长期稳定运行...
- 光颉Viking MFD系列电阻器:面向工业级应用的可靠之选 光颉Viking MFD系列电阻器的技术亮点光颉Viking MFD系列电阻器是专为工业环境设计的高性能贴片电阻,融合了优良的耐久性、抗干扰能力与精准的电气性能。相较于传统碳膜或金属膜电阻,MFD系列在可靠性、散热能力和抗湿热方面表...
- HJ系列高压电容芯片:面向未来电力电子的高效能之选 HJ系列高压电容芯片的技术突破与应用前景随着能源结构转型与智能电网的发展,对电力电子设备的效率、体积与寿命提出了前所未有的挑战。HJ系列高压电容芯片应运而生,专为高功率密度、高可靠性应用场景量身打造,代表了...
- 电压转换与电位转换器(ULS)在低功耗系统中的应用解析 电压转换与电位转换器(ULS)的核心作用电压转换器(Voltage Converter)和电位转换器(Potential Converter),在现代电子系统中扮演着至关重要的角色,尤其在低功耗、高集成度的嵌入式设备中。其中,基于ULS(Ultra-Low Supply)技术的...
- 温度系数和电阻率的关系 电阻的温度系数,是指当温度每升高一度时,电阻增大的百分数。电阻率不仅与材料种类有关,而且还与温度、压力和磁场等外界因素有关。金属材料在温度不高时,ρ与温度t(℃)的关系是ρt=ρ0(1+at),式中ρt与ρ0分别是t℃和0℃时...
- 电阻值系列和精度等级的关系 什么是精密电阻 其实,对于不是搞计量的不需要分的那么清楚,可以大体上认为高精密、高准确、低误差等是一个意思。但是,对于“精度”一词,可以分解成分解成三个要素:1. 温度系数。温度变化是电阻的大敌,温度系数一...
- AC-DC转换器二次侧PSR加速器技术解析与应用优势 AC-DC转换器二次侧PSR加速器技术解析随着电子设备对电源效率和小型化要求的不断提升,AC-DC转换器在消费类电子、工业控制及智能家居等领域广泛应用。其中,二次侧原边反馈(Primary Side Regulation, PSR)技术因其无需光耦隔离、降...
- 一文带你了解精密电阻中的TCR/PPM值到底是什么意思 精密电阻中的TCR/ppm值精密电阻器是指电阻误差、电阻器的热稳定性(温度系数)和电阻器的分布参数(分布电容和分布电感)均符合一定标准的电阻器。精密电阻的特点是精密电阻要求电阻的电阻误差、热稳定性(温度系数)和...
- 铜合金的电阻率和温度系数等电阻参数和其他常用材料系数 铜的电阻率温度系数 1、简介 铜的电阻率温度系数是多少呢?铜的电阻率温度系数定义是什么呢?我们先来纠正下“铜的电阻率温度系数”这个词。铜的电阻率温度系数其实正确的叫“铜的电阻温度系数”。下面介绍到的铜的电...
- 英国*RGEN压力开关:可靠性和精度的典范 英国*RGEN品牌提供了一系列高性能的压力开关产品,这些设备被广泛应用于工业自动化控制领域。RGEN压力开关以其出色的可靠性和精度而著称,在各种苛刻的工作环境中都能保持稳定的性能。为了满足不同行业的需求,该品牌提...
- AC-DC转换器中的二次侧PSR加速器工作原理 在现代电子设备中,AC-DC转换器是不可或缺的一部分,它负责将交流电(AC)转换为直流电(DC),以满足各种电子设备的需求。而二次侧PSR(Power Supply Rejection)加速器则是提高转换效率和稳定性的关键技术之一。PSR加速器主要用...
- 长寿命电解电容的耐压和铝箔有关系吗 您在购买铝电解电容时,是否只关注价格?一般很少去关注电解电容的材料吧?铝电解电容的核心材料“铝箔”,这也是影响整个电解电容质量和电性能的最核心材料,直接影响着铝电解电容器的使用寿命,那么您对铝电解电容...
- 深入解析时钟发生器频率合成器在高速通信系统中的关键作用 时钟发生器频率合成器在高速通信中的核心价值在5G基站、光通信模块和高速数据传输设备中,时钟发生器与频率合成器不仅是时间基准的提供者,更是系统性能的决定性因素。其稳定性和精度直接影响误码率、信号完整性与系统...
- DC-DC降压转换器与LDO对比:效率、噪声与应用场景深度解析 DC-DC降压转换器与LDO的核心区别在现代电子系统中,电源管理是确保设备稳定运行的关键环节。其中,DC-DC降压转换器和低压差稳压器(LDO)是最常见的两种电压调节方案。尽管它们都用于将输入电压降至所需输出电压,但在工作...
- 电容工作温度范围和温度系数 电解电容温度系数一般是在给定的温度间隔内,温度每变化1℃的时候,电解电容的变化数值与该温度下的标称电容的比值。一般的电解电容温度范围上限是105度也有85度的,有些耐高温的电解电容也有125度或者135度。下限温度一...